During the last months we have been very active working in the development of a complete new system for at home rehabilitation, the Neurorehabilitation Training Toolkit (NTT). The NTT is conceived as a rehabilitation tool for the at home training of motor deficits, more concretely those resulting from stroke although it may be applicable to other diseases. Similarly to our previous work, this system does not aim at substituting regular rehabilitation approaches but trying to reach where regular approaches can not. Building on our previous experience we have designed the NTT based on a number of principles: concepts for effective rehabilitation (repetitive, bimanual, task oriented, personalized training); capitalizing on the existing brain mechanisms for recovery (cortical plasticity); utilizing state of the art interactive technologies (Virtual Reality, Serious Games, Storytelling); and making it FREE and WORLDWIDE ACCESSIBLE. These design principles have shaped the NTT to its current form.
We were striving from the beginning to be able to build “the lowest cost” neurorehabilitation system possible while still capturing the best of the state of the art on neurorehabilitation systems and even pushing it further. The mere fact of building a general solution already implies that it will be a non optimal solution in some cases, although in most cases it will do its job. Taking this into account, we have designed an almost zero cost upper limb rehabilitation system using already available home based technology:
– The NTT is build around the idea of remote users having access to a PC with an Internet connection. Capitalizing on the advantages and today’s availability of Internet, the NTT does not need to be deployed anywhere in order to be used. The NTT lives in the Internet and is directly accessed via any modern web browser. The NTT is executed locally as a web applet and no local installation of the software is required. That means that upgrades on the NTT can be directly made available to all users in a completely transparent manner.
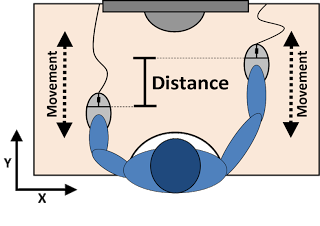
– In order to reduce the hardware requirements of the system to a minimum we have chosen to use regular USB mice as interface devices. Computer mice are not only low cost devices, but also largely widespread and well tested technology that requires no special installation. Thus, 2 computer mice are used to track the movements of the right and left hand respectively.
– The NTT is build on the concepts of repetitive and task oriented training, known to support and effectively mobilize neural plasticity. Moreover, a bimanual training task is selected for a number of reasons, among them the fact that the ability of supporting the paretic arm activity with the healthy arm enables a larger spectrum of motor impaired users.
During the last months we have been very active working in the development of a complete new system for at home rehabilitation, the Neurorehabilitation Training Toolkit (NTT). The NTT is conceived as a rehabilitation tool for the at home training of motor deficits, more concretely those resulting from stroke although it may be applicable to other diseases. Similarly to our previous work, this system does not aim at substituting regular rehabilitation approaches but trying to reach where regular approaches can not. Building on our previous experience we have designed the NTT based on a number of principles: concepts for effective rehabilitation (repetitive, bimanual, task oriented, personalized training); capitalizing on the existing brain mechanisms for recovery (cortical plasticity); utilizing state of the art interactive technologies (Virtual Reality, Serious Games, Storytelling); and making it FREE and WORLDWIDE ACCESSIBLE. These design principles have shaped the NTT to its current form.
We were striving from the beginning to be able to build “the lowest cost” neurorehabilitation system possible while still capturing the best of the state of the art on neurorehabilitation systems and even pushing it further. The mere fact of building a general solution already implies that it will be a non optimal solution in some cases, although in most cases it will do its job. Taking this into account, we have designed an almost zero cost upper limb rehabilitation system using already available home based technology:
– The NTT is build around the idea of remote users having access to a PC with an Internet connection. Capitalizing on the advantages and today’s availability of Internet, the NTT does not need to be deployed anywhere in order to be used. The NTT lives in the Internet and is directly accessed via any modern web browser. The NTT is executed locally as a web applet and no local installation of the software is required. That means that upgrades on the NTT can be directly made available to all users in a completely transparent manner.
– In order to reduce the hardware requirements of the system to a minimum we have chosen to use regular USB mice as interface devices. Computer mice are not only low cost devices, but also largely widespread and well tested technology that requires no special installation. Thus, 2 computer mice are used to track the movements of the right and left hand respectively.
– The NTT is build on the concepts of repetitive and task oriented training, known to support and effectively mobilize neural plasticity. Moreover, a bimanual training task is selected for a number of reasons, among them the fact that the ability of supporting the paretic arm activity with the healthy arm enables a larger spectrum of motor impaired users.
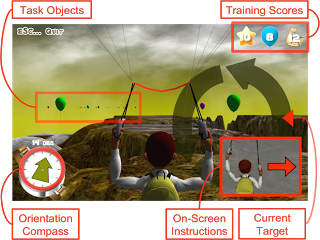
– The training task is embedded into an intuitive steering task in which bimanual displacements on a table top are used to guide the flight of a glider through a virtual scenario to collect flying items. The task is auto-adaptive, being it able to determine user’s performance and adapt its difficulty accordingly. A number of training objectives can be set such as bimanual coordination, movement smoothness, range of motion, etc…
– The NTT gives online feedback on performance (success in the task and amount of physical movement) and progress, as well as it embeds the training in an engaging game like experience that accompanies the user through a virtual trip. At the end, a summary of the achievements is reported.
A full description of the NTT design guidelines, tests and its analysis can be found in this paper recently published in the journal “Stroke Research and Treatment”. At this moment we are making a BETA version of NTT available to you for evaluation purposes with the hope that it becomes a very useful and effective tool. Please bear with us. We expect the NTT to improve over time – with newer versions and your feedback – and to be able to clinically evaluate its impact in a number of research studies.
Developed by: Sergi Bermúdez i Badia
Publications:
Bermudez i Badia, S., & Cameirao, M. S. (2012). The Neurorehabilitation Training Toolkit (NTT): A Novel Worldwide Accessible Motor Training Approach for At-Home Rehabilitation after Stroke. Stroke Research and Treatment, 2012. https://doi.org/10.1155/2012/802157 CITE DOWNLOAD
Bermúdez, i B. S., Lewis, E., & Bleakley, S. (2014). Combining virtual reality and a myoelectric limb orthosis to restore active movement after stroke: a pilot study. International Journal on Disability and Human Development, 13(3), 393–399. https://doi.org/10.1515/ijdhd-2014-0333 CITE DOWNLOAD
Neurorehabilitation Training Toolkit Requirements & Download Links
Requirements
- In its current form, the NTT training task requires patients to be able to read, and not to have major cognitive deficits and seizures, sensory aphasias, or other perceptual problems that could impede the understanding of the task.
- A computer running Windows O.S. (tested on Windows XP, 7, 8.x)
- There are multiple supported interfaces (up to 2 computer mice, webcam, myomo’s mpower 1000, kinect v1 and v2 and wiimote through the Reh@Panel), but the basic version works with 1 or 2 computer mice.
Download Links
Latest Stable Version: NTT last version (link)
1 – Launch Reh@Panel
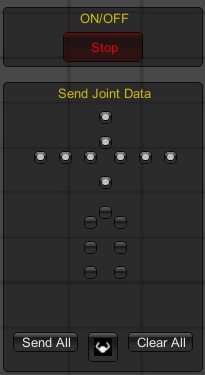
2 – Choose “Devices” on Main menu, then Kinect 1, click on the Upper Body symbol and hit “Start”:
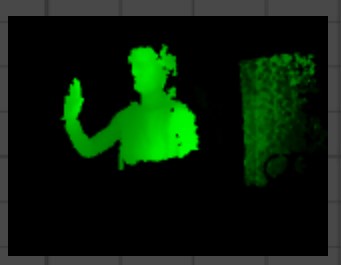
3 – Make sure Kinect is detecting you well (green):
4 – Launch NTT application
5 – Select “Configuration” and take note of the IP and Port on the top left:

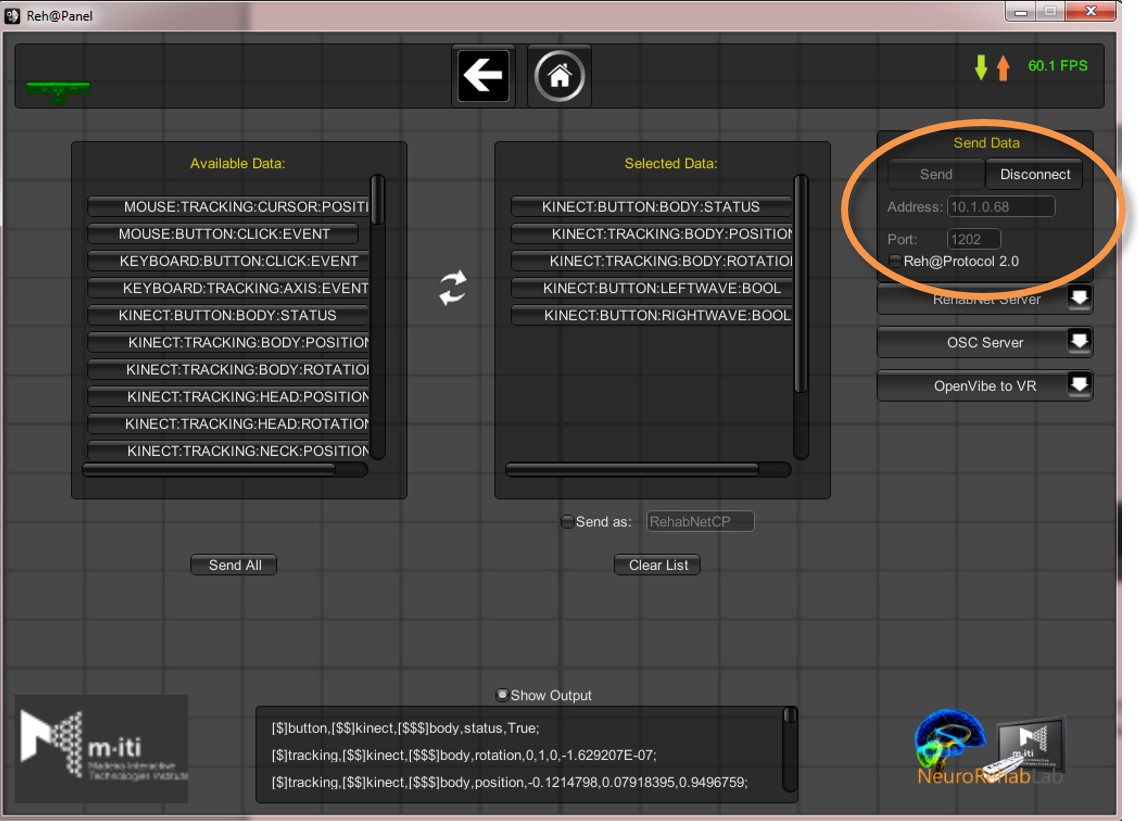
6 – Go back to Reh@Panel, on Main Menu select “Data”, then “Networking”, and type the IP and Port on the Address and port fields. Make sure you are not using Reh@Panel Protocol 2.0 (disable this checkbox). “Send” button should be pressed:
7 – Back again in NTT, select “Controllers”, and enable RehabNetCP:

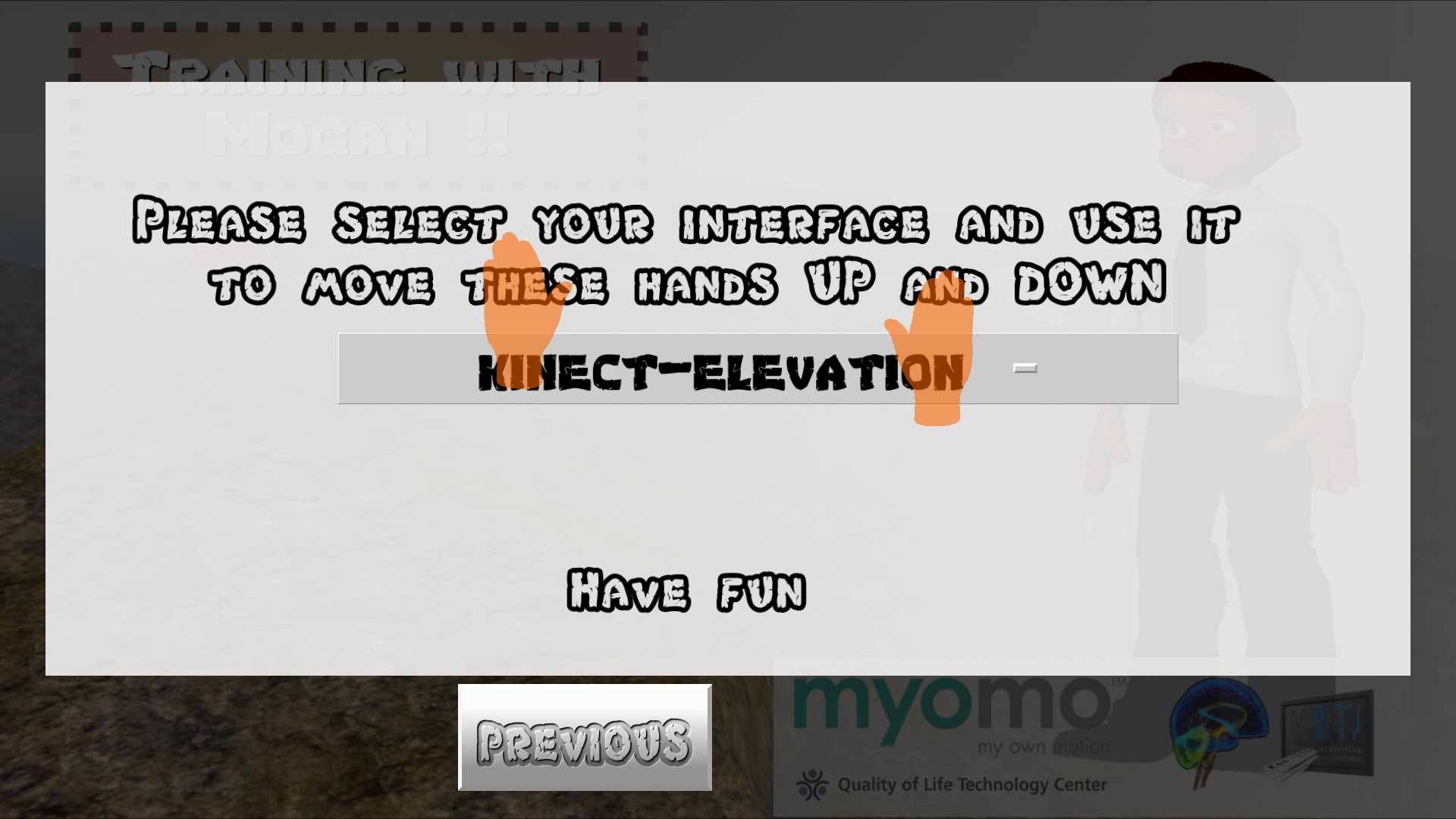
8 – Press the RehabNetCP icon and if the displayed hands are moving, it means the connection with Kinect I is well established:
9 – You can then go back to Main Menu (pressing “Previous” button till you reach it), and then press “Start” followed by “Next”. Finally, the Gliding Session: